

Development of magnetic spiderman to optimize the procedures of repairment of donor liver from organ donation
-
摘要:
目的 研制一款利用磁定位的牵拉装置,优化器官捐献供肝修整操作。 方法 采用猪肝标本进行供肝修整操作牵拉力测量,根据测量结果研制磁蜘蛛人,将磁蜘蛛人应用于猪肝标本上模拟器官捐献供肝修整操作,并检测磁蜘蛛人有效性。 结果 供肝修整操作中所需牵拉力均不超过2 N。成功完成磁蜘蛛人的制造,磁蜘蛛人的磁体可与顺磁性修肝盆之间产生3 N磁着力,磁蜘蛛人的自回缩牵拉线可提供2.5 N牵拉力。磁蜘蛛人成功应用于6例器官捐献供肝修整模拟实验,手术时间(54±5)min。手术过程中未发生夹头滑脱、底座移位、脱落等现象。在多个磁蜘蛛人的配合下,除结扎血管外,术中其余操作均由主刀一人完成。 结论 磁蜘蛛人体积小巧、定位灵活,能够进行牵拉操作且不占用操作空间,可有效优化器官移植供肝修整操作,减少手术操作者人数。 Abstract:Objective To develop a pulling device using magnetic positioning to optimize the procedures of repairment of donor liver from organ donation. Methods The pig liver specimens were used to measure the pull force of repairment of donor liver, magnetic spiderman was developed based on the measurement results. The magnetic spiderman was applied to simulate the repairment of donor liver from organ donation on the pig liver specimens. The effectiveness of magnetic spiderman was also evaluated. Results The pulling force was required all less than 2 N during the repairment of donor liver. The magnetic spiderman was successfully manufactured. The magnets of magnetic spiderman could generate 3 N magnetic forces with paramagnetic basin of hepatic repairment. The self-retraction pull wire of the magnetic spiderman could provide 2.5 N pulling forces. The magnetic spiderman was successfully applied to the simulated experiment of repairment of donor liver from organ donation in 6 cases. The operation time was (54±5) min. No clip slippage, displacement and slippage of the base occurred during the operation. With the cooperation of multiple magnetic spidermen, the remaining surgical procedures were performed by one single surgeon except for the vascular ligation. Conclusions The magnetic spiderman has small volume and implements flexible positioning, can perform pulling operation and not take up operational space. It can effectively optimize the procedures of repairment of donor liver from organ donation and reduce the quantity of surgeons. -

图 1 磁蜘蛛人设计图
1为磁体;2为底座;3为自回缩牵拉线;4为夹头;5为磁蜘蛛人;6为顺磁性修肝盆
Figure 1. Design diagram of the magnetic spiderman

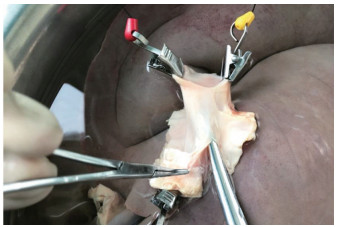
图 3 供肝修整模拟实验(肝上下腔静脉)
Figure 3. Simulation experiment of the repairment of donor liver(suprahepaticvena cava)
表 1 供肝修整中各部位的牵拉力
Table 1. Pulling forces of each part during the repairment of donor liver
牵拉部位 力的大小(N) 力的方向 膈肌 1.60±0.26 反向 肝上下腔静脉 1.30±0.23 反向 肝下下腔静脉 1.40±0.21 反向 门静脉周围组织 0.70±0.12 反向 肝动脉周围组织 0.80±0.15 反向 胆道周围组织 0.60±0.09 反向 胆囊 1.10±0.18 反向  下载: 导出CSV
下载: 导出CSV
-
[1] 郑树森.中国器官捐献与移植现状[J].武汉大学学报(医学版), 2016, 37(4): 523-525. DOI: 10.14188/j.1671-8852.2016.04.002.ZHENG SS. The current situation of organ donation and transplantation in China[J]. Med J Wuhan Univ, 2016, 37(4): 523-525. DOI: 10.14188/j.1671-8852.2016.04.002. [2] JAMSHIDI R, STEPHENSON JT, CLAY JG, et al. Magnamosis: magnetic compression anastomosis with comparison to suture and staple techniques[J]. J Pediatr Surg, 2009, 44(1): 222-228. DOI: 10.1016/j.jpedsurg.2008.10.044. [3] MURPHY TJ, KEARNEY D. Esophageal sphincter device for gastroesophageal reflux disease[J]. N Engl J Med, 2013, 368(21): 2039. DOI: 10.1056/NEJMc1303656#SA2. [4] SHI Y, ZHANG W, DENG YL, et al. Magnetic ring anastomosis of suprahepatic vena cava: novel technique for liver transplantation in rat[J]. Transpl Int, 2015, 28(1): 89-94. DOI: 10.1111/tri.12418. [5] LIU SQ, LEI P, CUI XH, et al. Sutureless anastomoses using magnetic rings in canine liver transplantation model[J]. J Surg Res, 2013, 185(2): 923-933. DOI: 10.1016/j.jss.2013.07.025. [6] LIU SQ, LEI P, CAO ZP, et al. Nonsuture anastomosis of arteries and veins using the magnetic pinned-ring device: a histologic and scanning electron microscopic study[J]. Ann Vasc Surg, 2012, 26(7): 985-995. DOI: 10.1016/j.avsg.2012.04.003. [7] LI J, LÜ Y, QU B, et al. Application of a new type of sutureless magnetic biliary-enteric anastomosis stent for one-stage reconstruction of the biliary-enteric continuity after acute bile duct injury: an experimental study[J]. J Surg Res, 2008, 148(2): 136-142. DOI: 10.1016/j.jss.2007.09.014. [8] FAN C, MA J, ZHANG HK, et al. Sutureless intestinal anastomosis with a novel device of magnetic compression anastomosis[J]. Chin Med Sci J, 2011, 26(3):182-189. doi: 10.1016/S1001-9294(11)60046-1 [9] FA N C, YA N X P, L I U S Q, e t a l. R o u x - e n - Y choledochojejunostomy using novel magnetic compressive anastomats in canine model of obstructive jaundice[J]. Hepatobiliary Pancreat Dis Int, 2012, 11(1): 81-88. doi: 10.1016/S1499-3872(11)60129-X [10] C U I X, L E I P, L I U S, e t a l. A s u t u r e l e s s method for digestive tract reconstruction during pancreaticoduodenectomy in a dog model[J]. Int J Clin Exp Med, 2015, 8(1): 289-296. http://cn.bing.com/academic/profile?id=88a8c7dd7c90c8c23f8549a516a6e116&encoded=0&v=paper_preview&mkt=zh-cn [11] YAN X, FAN C, MA J, et al. Portacaval shunt established in six dogs using magnetic compression technique[J]. PLoS One, 2013, 8(9): e76873. DOI: 10.1371/journal.pone.0076873. [12] XUE F, LI J, LU J, et al. Splenorenal shunt via magnetic compression technique: a feasibility study in canine and cadaver[J]. Minim Invasive Ther Allied Technol, 2016, 25(6): 329-336. doi: 10.1080/13645706.2016.1213750 [13] PADILLA BE, DOMINGUEZ G, MILLAN C, et al. The use of magnets with single-site umbilical laparoscopic surgery[J]. Semin Pediatr Surg, 2011, 20(4): 224-231. DOI: 10.1053/j.sempedsurg.2011.05.007. [14] DOMINGUEZ G, DURAND L, DE ROSA J, et al. Retraction and triangulation with neodymium magnetic forceps for single-port laparoscopic cholecystectomy[J]. Surg Endosc, 2009, 23(7): 1660-1666. DOI: 10.1007/s00464-009-0504-5. [15] JOSEPH RA, SALAS NA, DONOVAN MA, et al. Single-site laparoscopic (SSL) cholecystectomy in human cadavers using a novel percutaneous instrument platform and a magnetic anchoring and guidance system (MAGS): reestablishing the "critical view"[J]. Surg Endosc, 2012, 26(1): 149-153. DOI: 10.1007/s00464-011-1843-6. [16] BEST SL, BERGS R, SCOTT DJ, et al. Solo surgeon laparo-endoscopic single site nephrectomy facilitated by new generation magnetically anchored and guided systems camera[J]. J Endourol, 2012, 26(3): 214-218. DOI: 10.1089/end.2011.0143. [17] RIVAS H, ROBLES I, RIQUELME F, et al. Magnetic surgery: results from first prospective clinical trial in 50 patients[J]. Ann Surg, 2018, 267(1): 88-93. DOI: 10.1097/SLA.0000000000002045. [18] SHANG Y, GUO H, ZHANG D, et al. An application research on a novel internal grasper platform and magnetic anchoring guide system (MAGS) in laparoscopic surgery[J]. Surg Endosc, 2017, 31(1):274- 280. DOI: 10.1007/s00464-016-4968-9. [19] FENG H, DONG D, MA T, et al. Development of an in vivo visual robot system with a magnetic anchoring mechanism and a lens cleaning mechanism for laparoendoscopic single-site surgery (LESS)[J]. Int J Med Robot, 2017, 13(4). DOI: 10.1002/rcs.1791. [20] DONG DH, ZHU HY, LUO Y, et al. Miniature magnetically anchored and controlled camera system for trocar-less laparoscopy[J]. World J Gastroenterol, 2017, 23(12): 2168-2174. DOI: 10.3748/wjg.v23.i12.2168. -

 下载:
下载:


 点击查看大图
点击查看大图

图(3) / 表(1)
计量
- 文章访问数: 134
- HTML全文浏览量: 81
- PDF下载量: 6
- 被引次数: 0


